咨詢電話
13924666952
400-158-1606


工業(yè)機器人系統(tǒng)為華成工控系列六軸機器人控制系統(tǒng),以下教導程序的舉例,可以進一步了解和實踐機械手的編程。在自行教導機械手程序時,根據(jù)實際情況來設定各伺服軸的位置和對多關節(jié)機器人的控制。
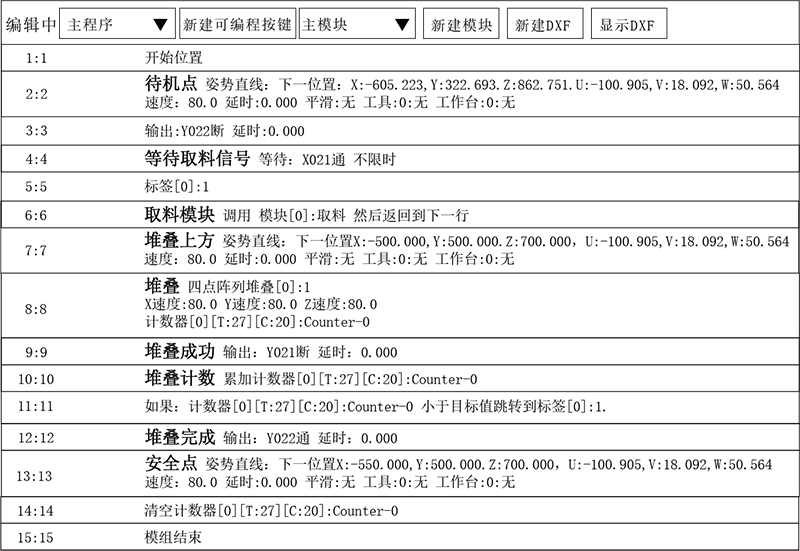
程序目的:該程序用來進行堆疊,機械手停在待機點位置等待機械手開始運動信號。機械手開始運動后,機械手在取料點位置取料,取料完成后,進行堆疊,直到堆疊堆滿。
程序過程:
將機械手調(diào)到自動運行狀態(tài)。
機械手運行到待機點位置,等待開始信號。
調(diào)用取料模塊,進行取料。
取料成功后輸出取料成功信號,并前往堆疊。
機械手將產(chǎn)品放到堆疊指定位置。
堆疊完成所有位置后,機械手前往安全點位置,清空計數(shù)器。
機械手返回待機點位置,等待開始信號。
主程序主模塊程序:
主程序模塊[0]:取料程序:
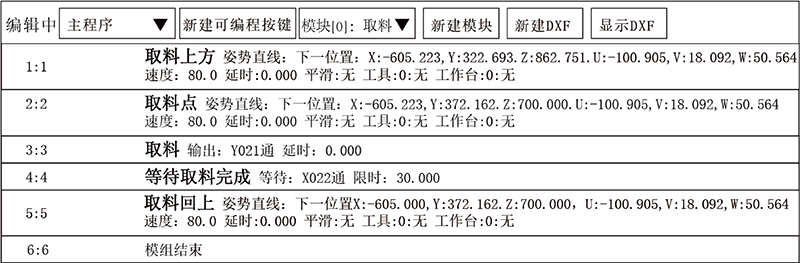
注意:此程序為模板,機械手位置信息請根據(jù)實際所需進行設置。
版權所有 ? 深圳市華成工業(yè)控制股份有限公司 未經(jīng)許可不得復制、轉載或摘編,違者必究 版權聲明
Copyright ? Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網(wǎng)站ICP備案號: 粵ICP備19106162號
技術支持:新新網(wǎng)絡

